Graeme Winter
Bare metal assembly on rp2040
About time I started to learn how to do this properly so start doing some ARM thumb programming on pico - have to use the SDK framework if not the SDK to get the loader etc. set up.
Hello
Simple one to start - Hello, World! - which also sends a tick but relies on printf and stdio_init_all external functions so really is not assembly:
.thumb_func
.global main
main:
mov r7, #0
bl stdio_init_all
loop:
ldr r0, =hello
add r7, #1
mov r1, r7
bl printf
b loop
.data
.align 4
hello: .asciz "Hello, world! %d\n"
Does show how functions are called from assembly, and the use of the .data code section, but that is about it.
Blinky
This is obviously the second basic task which is a lot more bare metal. Examples everywhere have you set up the GPIO etc. with function calls which really is cheating so this manually sets up all the registers:
.thumb_func
.global main
.align 2
main:
mov r2, #5
ldr r1, gpioc0
str r2, [r1, #0x4]
ldr r1, gpioc1
str r2, [r1, #0x4c]
ldr r1, gpiod
mov r2, #48
str r2, [r1, #0x4]
str r2, [r1, #0x68]
ldr r1, sio
ldr r2, led
str r2, [r1, #0x20]
loop:
str r2, [r1, #0x1c]
ldr r0, count
nop
tick:
sub r0, r0, #1
cmp r0, #0
bne tick
b loop
.align 4
gpioc0: .word 0x40014000
gpioc1: .word 0x40014080
gpiod: .word 0x4001c000
sio: .word 0xd0000000
led: .word 0x2000001
count: .word 30
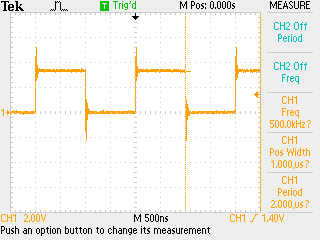
Note that the data items are not in a .data block - which means that they are local and the ldr can be performed as a single step rather than first loading the address of the datum before then loading the datum. Otherwise you would load e.g. =sio into a register before loading the value of sio. Because the M0+ is a single issue core can count instructions here (ldr, str take two, b takes two, cmp one etc.) to work out that each cycle takes four ticks. Thus, the full cycle time with the added nop is 4 x count + 5 i.e. 125, so we have a 500 kHz square wave here:
No external functions used here to implement the program but a lot of extra studd in the final binary added by the SDK / cmake set-up.