Graeme Winter
2023-01-02
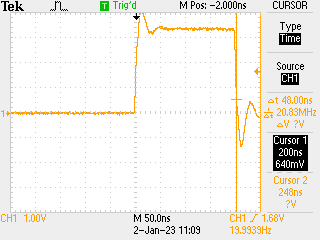
OK, nerd sniped - see how fast I can make the IRQ callbacks. Turns out existing method had a lot of overhead so find a much tighter way (still counting with PIO) - just short of 200ns seems possible, some 25 cycles…
Diffs at this commit.
… optimising the PIO program to give finer resolution, get it to two tick resolution (16ns) by playing in µPython:
from machine import Pin, PWM
import rp2
pin = Pin(0, Pin.OUT)
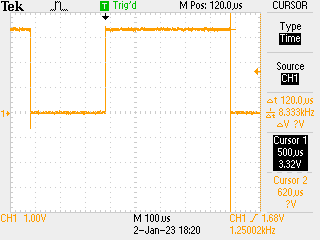
# deterministic source for 500µs pulses (reliably reproduced on 'scope)
pwm = PWM(pin)
pwm.freq(1250)
pwm.duty_ns(500000)
@rp2.asm_pio()
def count_high():
mov(x, invert(null))
wait(1, pin, 0)
label("high")
jmp(x_dec, "next")
label("next")
jmp(pin, "high")
mov(isr, x)
push()
sm = rp2.StateMachine(0, count_high, jmp_pin=pin)
sm.active(1)
for j in range(100):
print(0xffffffff - sm.get())
sm.active(0)
Reports 31250 which x 16ns gives 500µs as expected: