Graeme Winter
µPython for real time
Decided I should see what you can do with µPython and real-time programming on the PIO… turns out it works fine but obviously only useful for very limited values of real-time.
Implemented simple time counter on PIO: wait until high, start, while high decrement, return once falls to low: takes two instructions / cycle so 16ns with default config, confirmed yesterday on oscilloscope.
Example code for this (other programs will appear): todo assess how “noisy” a busy loop with sleep() is…
Like this then:
import time
from machine import Pin
import rp2
p0 = Pin(0, Pin.OUT)
@rp2.asm_pio()
def count_high():
mov(x, invert(null))
wait(1, pin, 0)
label("high")
jmp(x_dec, "next")
label("next")
jmp(pin, "high")
mov(isr, x)
push()
sm = rp2.StateMachine(0, count_high, jmp_pin=p0)
sm.active(1)
# target time for sleeping, ms
delta_ms = 50
for j in range(100):
p0.on()
time.sleep_ms(delta_ms)
p0.off()
delta = (16 * (0xFFFFFFFF - sm.get())) - delta_ms * 1_000_000
print(f"∂ = {delta} ns")
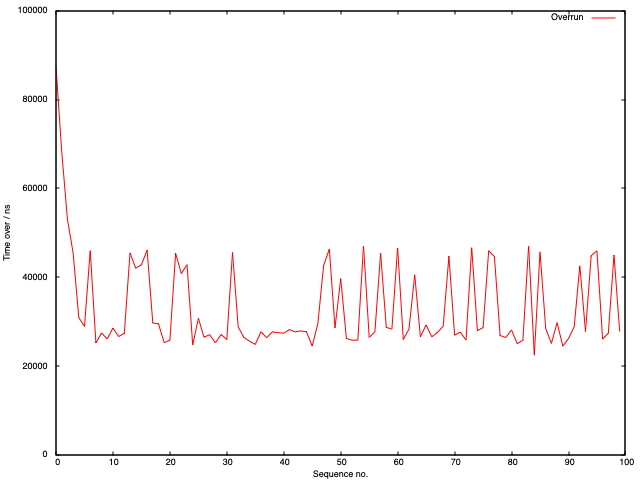
sm.active(0)
Shows that the interaction with µPython gives noisy and measurable overhead: not surprising as p0.on() and p0.off() will take some finite time to execute (should do the same in C…) - results: